How does Ground Penetrating Radar (GPR) work?
What is Ground Penetrating Radar (GPR)?
Ground-Penetrating Radar (GPR) is the non - destructive geophysical technique that applies radio waves to image the subsurface. It is the most modern and rapidly developing geophysical method.
It uses a transmitter that emits pulses of high frequency electromagnetic waves into the subsurface.Transmitter is either moved slowly across the ground surface or moved at a fixed station interval.
GPR is used to investigate depths from the first centimeters to hundreds of meters.
The simplicity and speed in carrying out fieldwork using the Ground - Penetrating Radar method combined with the lightweight of the equipment set make it possible to Operate GPR surveys on multi environments such as the ground, from the air, underwater, and in space.

A GPR system (a Radar) is a device for non-destructive subsurface imaging that operates by electromagnetic waves.
GPR depending upon configuration will have a Radio Frequency (RF) Transmitter, Receiver, ADC and Data processing circuit. It also consists of a radar controller to guide the start and stop of radar, battery for powering up the sub-system and a reliable state data recorder.
How does Ground Penetrating Radar (GPR) signals Penetrate?
In order for the GPR signal, an electromagnetic wave, to penetrate inside, the site environment should not conduct electric current such as soil must be dry, free from clay contents and rocks. Others are freshwater, ice, and frozen rocks. Also there are car roads, foundation slabs, house walls, bridges, and any concrete, stone, and wooden structures just to mention a few.
DEPTH OF PENETRATION
It is tens of meters (10's of meters) to a fraction of a meter. It is the function of subsurface conditions and Operating signal frequency.
Such that the lower the Operating frequency, the Deeper the depth of penetration than the higher operating frequency. This is because higher frequency signals attenuate faster compared to lower operating frequency.
D = C/2πf, where D - Penetration Depth, C - velocity of EM wave, f - Operating Frequency.
Where C = V √(μrεr) for V - Velocity of Radar wave, μr - Relative permeability, εr - Relative permittivity of the medium.
How does Ground Penetrating Radar work?
Working Principle of Ground Penetrating Radar (GPR)
The GPR technique works by using similar principles as seismic and sonar methods. At which in the case of the bistatic systems, one antenna acts as the transmitter, radiates short pulses of high frequency (MHz to GHz) electromagnetic waves, and the other antenna, acts as the receiver, measures the characteristics of the (modified) signal as a function of time.
When the source antenna, the transmitter, is placed on the ground surface, spherical waves are radiated both upward into the air and downward into the soil. Some of the propagating energy travels into the subsurface and is reflected as GPR reflections by subsurface where dielectric contrasts exists while some of the energy travels in the near subsurface along the air–ground interface as GPR ground waves at which both modified signals are measured by the receiver antenna
The detected EM radar waves are processed into signals then displayed on Radar screen as Radar image or GPR profile. See figure 1 below
The GPR profile is a signal plotted section of horizontal distance against depth (time). The depth is a function of time and signal velocity.

Figure 1: Simple GPR working flow Module
TYPES OF GROUND PENETRATING RADAR (GPR) SYSTEM.
As previously defined, GPR system can be broadly classified as
1) Continuous Wave (CW) Radar
It uses a stepped FMCW transmitter and a receiver with a local oscillator as a copy of the transmitted signal. The lower the frequency of transmitted signal, the better is the penetration depth and when the transmitted signal is higher bandwidth then the better is the resolution. The beat frequency is DC per frequency step but will be sinusoidal in time domain over the modulation period of the transmitted signal. The frequency of this signal determines the target distance.
2) Pulsed Radar
It uses an extremely short time duration (~nsec) of high power transmitted signal which is received after a two-way time delay from the target by a receiver.
Note: GPR uses wide-beam ground grazing antenna. As the instrument passes over the target, the target distance varies hyperbolic; with a peak in image denoting the scan time when the goal was at a nadir.
Ground penetrating radar (GPR ) DATA Acquisition Modes
1. Common - offset Reflection Mode
One of the most commonly utilized GPR acquisition modes is surface common-offset reflection at which the collection of one trace per surface location is involved from a transmitter–receiver antenna pair (see Figure 2 ).

Figure 2: Common - offset Reflection Mode.
Through this acquisition mode, data are displayed as two-dimensional (2D) wiggle trace profiles. Such profiles can be displayed in real time during data collection and can be stored digitally for subsequent data processing.
2. Common - Midpoint (CMP) Mode
GPR Common Midpoint (CMP) gathers traces where the midpoint between the transmitting and receiving antennas is common to several antenna pairs (see figure 3). GPR - CMP data have been processed using a standard seismic data processing sequence to obtain estimates of dielectric constants at one location and as a function of depth (Lunt et al., 2005).
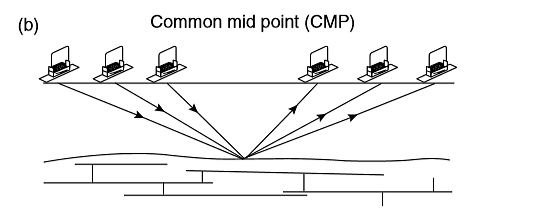
Figure 3: Common Midpoint (CMP) Mode
Resolution of ground penetrating radar (GPR) Reflection
What is the Resolution of Ground Penetrating Radar (GPR) Reflection?
Resolution of GPR reflection data can be defined as the ability of the system to distinguish two signals that are close together in time.
Resolution varies as a function of antenna frequency and the electrical properties of the host material.
Davis and Annan (1989) suggested that for wet soil, vertical resolution on the order of 7 m is possible using 10 MHz radar antennas, 0.5 m resolution is possible using 100 MHz radar antennas, and less than a centimeter resolution is possible using 1000 MHz radar antennas.
However increasing the frequency increases the resolution but decreases the penetration depth. Also affecting the radar signal penetration depths are the radar system performance, reflection properties at boundaries where electrical properties vary, and attenuation that is controlled by scattering, electrical properties of surface and subsurface materials, and geometrical spreading losses.
Golden Tip: Generally, you have to choose a radar center frequency that yields both sufficient penetration and resolution; for field applications this is often between 50 and 200 MHz.
It is, however, possible to collect radar data at the same location using several different frequency antennas. And the fact that the use of multiple frequency antennas enables sampling over a greater depth range with optimal resolution for all depths (Smith and Jol, 1992)
Advantages of Ground Penetrating Radar (GPR)
i/ Continuous display of data along a traverse which can be interpreted qualitatively in the field.
ii/ Simple and Fast to carry out in the field, This is due the lightweight of the equipment set make it possible to Operate GPR surveys on multi environments such as the ground, from the air, underwater, and in space.
ii/ High resolution data under favorable site conditions. This enables geophysicists to quickly evaluate subsurface site conditions.
iii/ Environmental friend technique, It is non - destructive technique, meaning that it does not lead to negative environmental effects such as site destruction.
Disadvantages (Limitations) of Ground Penetrating Radar (GPR)
i/ Site specific technique, such as it requires flat, clear, dry ground surface to operate well.
GPR performs better in unsaturated coarse or moderately coarse textured soils. GPR signal strength is attenuated in electrically conductive environments, such as systems dominated by the presence of clays or that have high ionic strength pore fluids.
ii/ Data quality can be easily degraded by uneven ground surface or cultural noise.
iii/ It is expensive to operate, when the site is not clear since it requires site preparation prior surveying.
iv/ Medium with resistivities below 100 Ωm are not practical for the GPR technique.
APPLICATIONS OF GROUND PENETRATING RADAR (GPR) METHOD.
In a wide consideration GPR method, aid in site assessment for near surface Engineering example civil, waste, hazardous because it provides subsurface information such as Depth, subsurface image.
However GPR is widely used in any situation with suitable ground conditions that need to look into subsurface but without ground destruction. These are some fields where it can be applied
i/ Mapping subsurface geology, such as bedrocks, gravels, cavities, underground streams, caves, underground mines. Even plant roots, their depth and distribution can be located by GPR without need for cutting them down.
ii/Archeological studies, through Archeological geophysics, GPR simplifies locating of archeological remains sites without invading them.
iii/ Forensic studies, through Forensic geophysics, GPR can aid collection of evidence from criminal scenes, without actually disturbing the scenes.
iv/ Locating buried objects such as pipes, tanks, barrels, walls.
v/ Hydrogeological investigation
Estimation of the dielectric constant is necessary to infer quantitative hydrogeological information from GPR data. However Dielectric constants are affected by material saturation, porosity, material constituency, temperature, and pore fluid composition.
Approximate dielectric constants for common near-surface materials shows that most dry materials have dielectric constants of 3 to 7, which are much lower than the dielectric constants of saturated materials.
For the high frequency range of interest used with GPR methods, the propagation phase velocity (v) in a low electrical conductivity material can be related to the dielectric constant (κ) as (Davis and Annan, 1989):
k = (c/v)2
Where c is the propagation velocity of electromagnetic waves in free space (3×108 m/s) Information about the dielectric structure of the shallow subsurface can be obtained via velocity analysis of reflection GPR data acquired with surface common-midpoint (CMP) or velocity analysis of transmitted signals acquired with cross hole acquisition geometry.
Based on Petrophysical models that used to link dielectric estimates obtained from GPR data to hydrogeological parameters such as water moisture content. For example, Topp et al.(1980) used a regression analysis to obtain an empirical relation known as Topp equation between dielectric constant (k) and volumetric moisture content (θ):
θ =−5.3×10−2 + 2.92×10−2κ − 5.5×10−4κ2 + 4.3×10−6κ3
Greaves et al. (1996) used the Topp equation to transfer interval velocity estimates obtained from surface CMP GPR data into subsurface water content estimates and Hubbard et al. (1997b) successfully used the relation to transfer dielectric constants obtained from cross hole radar measurements into water content estimates.
For a sand-clay system, Wharton et al. (1980) used a mixture formula to express the bulk dielectric constant as a function of the dielectric constants of air(κa), water(κw), sand (κs), and clay(κcl), as well as the porosity (φ),fractional water saturation (Sw),and the volumetric clay fraction (Vcl):
κ = [(1−φ)Vcl√κcl + (1−φ)(1−Vcl)√κs + Swφ√κw + (1−Sw)φ√κa]2
Knoll et al. (1995) found under laboratory conditions that Equation fit the observed dielectric behavior of a constructed unconsolidated sand–clay mixture. They converted the relation between effective dielectric constant, saturation, porosity, and clay fraction.
References
Annan, (2005), Shallow seismic methods, Chapter 8 in Hydrogeophysics, Eds. Y. Rubin and S. Hubbard, Springer,Netherlands,pp. 185–214.
Davis, J. and A. Annan, (1989), Ground-penetrating radar for high-resolution mapping of soil and rock stratigraphy. Geophysics. Prospecting. 37,531–551.
Greaves, R. J., D. P. Lesmes, J. M. Le, and M. N. Toksoz, (1996), Velocity variations and water content estimated from multi-offset,ground-penetrating radar, Geophysics, 61(3), 683–695.
Hubbard, S.,Y.Rubin, and E.Majer, (1997b), Ground penetrating radar-assisted saturation and permeability estimation in bimodal systems, Water Resour. Res.,33(5),971–990.
Knoll, M., R. Knight, and E. Brown, (1995), Can accurate estimates of permeability be obtained from measurements of dielectric properties? SAGEEP Annual Meeting Extended Abstracts, Environmental. Engineering. Geophysics. Soc.,Englewood,CO.
Lunt,I., S. Hubbard,and Y.Rubin, (2005). Soil moisture content estimation using ground-penetrating radar reflection data,J. Hydrology,doi:10.1016/j.j hydrol. 2004. 10. 014, 307/1–4,254–269.
Topp, G. C., J. L. Davis, and A. P. Annan, (1980). Electromagnetic determination of soil-water content: measurements in coaxial transmission lines.Water Resources. Res.,16,574–582.
Thank you for your attention!
SHARE! With your friends and colleagues!
Is the content useful and helpful to you? Want to support the Effort! You can support the Effort via >"Support the Effort Page"<
Follow this blog on Telegram group to gain more benefits.
Need Useful geophysics Products and Materials, Visit >>Base Store <<
SHARE! With your friends and colleagues if you found it interesting!
Grow Your Email Marketing.
Try Moosend Now





Comments
Post a Comment